加关注
加关注 加关注
加关注





新闻中心
机器视觉—人工智能的前沿
40年前,工业机器人的横空出世,带给人类更多自由与可能。今天,工业机器人正以迅猛的速度替代人工,从事繁重及枯燥的工作,并且向着更智能的方向在发展,而服务机器人,将是下一个风口。
服务机器人发展空间很大,但要想发展服务机器人,就要让机器人获得人的能力,首先就是视觉。
视觉对人很重要,人类获得讯息90%以上是依靠眼睛,而我们就来看看人工智能的前沿——机器视觉。
(视频36秒处机器人机械臂上安装的是电永磁铁来吸附的)
技术的演进与创新,推动制造业的变革与进步
智能化、仿生化是工业机器人的最高阶段,随着材料、控制等技术不断发展,实验室产品越来越多的产品化,逐步应用於各个场合。
伴随物联网的发展,多传感器、分布式控制的精密型工业机器人将会越来越多,逐步渗透制造业的方方面面,并且由制造实施型向服务型转化。
具有触觉、力觉或视觉的工业机器人,能在较为复杂的环境下工作;如具有识别功能或更进一步增加自适应、自学习功能,即成为智能型工业机器人。
机器人视觉,作为AI(人工智能)一个快速增长的分支,目的是能够给机器人与我们自己相当的视觉,在过去几年中,由于研究人员运用专门的神经网络,以帮助机器人识别和理解来自现实世界的图像,机器人视觉已经取得了巨大的进步。

机器人视觉犹如人的双眼
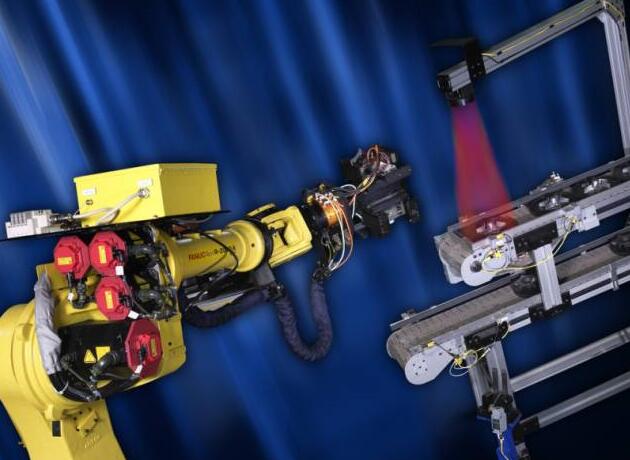
线激光

3D摄影测量

三维成像
基于结构光的三维成像,实际上是三维参数的测量与重现,需要投射结构光到被测物体上,通过结构光的变形(或者飞行时间等)来确定被测物的尺寸参数。
最常用光栅投影技术的其主要原理是

例如ABB的协作机器人Yumi已可以安装在AGV上行走并完成设定的工作,如果加上结构光视觉,结合物联网及数字化完成自主工作已不遥远。
随着连续采用这些技术,如神经网络和专用机器视觉硬件,我们正在迅速缩小人类和机器视觉之间的差距。
在将来的某一天,我们甚至开始看到机器人的视觉能力,可能会超越我们自己,使它们能够完成许多复杂的任务,并且我们的社会将会完全自主运作。